INTENSE REU Research Projects
The research project summaries presented here are representative of the work REU participants will perform at New Mexico Tech. Students are encouraged to identify specific projects of interest during the application process, and acceptance notifications will indicate the faculty mentor and general project the acceptance offer is relative to. The specific projects students will complete during the summer may vary from these descriptions as the research path and interests evolve.
Applications are accepted starting November 15, 2024! APPLY HERE: https://etap.nsf.gov/
Faculty Mentor: Dr. Mostafa Hassanalian, Associate Professor of Mechanical Engineering
 Across millions of years of evolution, nature has developed processes, objects, materials,
and functions to increase efficiency. Through biomimicry and inspiration, engineers
and biologists leverage evolutionary insights to produce solutions for complex tasks
in aerospace industries, such as drag reduction, locomotion, navigation, control,
sensing, and drone/robot design. This research project will investigate bioinspired
solutions for the development and optimization of autonomous systems for planetary
exploration. The REU student will study the characteristics of natural species, such
as animals, birds, or insects’ locomotion, dynamics, structure, behavior, etc., and
will apply the bioinspired lessons to the design of efficient drones and robots for
planetary exploration. Students will perform laboratory analyses on natural species
to explore wing geometries and body structures then apply the concepts to design and
prototype aerial, aquatic, or terrestrial robots including the aerodynamic structures,
control systems, and operational machinery. The student will learn aerodynamics, design
principles, SolidWorks software for design and 3D printing, programming for Arduino
controls, and electrical circuit wiring through development of the bioinspired drones/robots.
Research outcomes will include enhanced understanding of flight aerodynamics, development
of novel control algorithms for the designed motive platform, and the integration
of bioinspired designs to planetary exploration challenges.
Across millions of years of evolution, nature has developed processes, objects, materials,
and functions to increase efficiency. Through biomimicry and inspiration, engineers
and biologists leverage evolutionary insights to produce solutions for complex tasks
in aerospace industries, such as drag reduction, locomotion, navigation, control,
sensing, and drone/robot design. This research project will investigate bioinspired
solutions for the development and optimization of autonomous systems for planetary
exploration. The REU student will study the characteristics of natural species, such
as animals, birds, or insects’ locomotion, dynamics, structure, behavior, etc., and
will apply the bioinspired lessons to the design of efficient drones and robots for
planetary exploration. Students will perform laboratory analyses on natural species
to explore wing geometries and body structures then apply the concepts to design and
prototype aerial, aquatic, or terrestrial robots including the aerodynamic structures,
control systems, and operational machinery. The student will learn aerodynamics, design
principles, SolidWorks software for design and 3D printing, programming for Arduino
controls, and electrical circuit wiring through development of the bioinspired drones/robots.
Research outcomes will include enhanced understanding of flight aerodynamics, development
of novel control algorithms for the designed motive platform, and the integration
of bioinspired designs to planetary exploration challenges. Faculty Mentor: Dr. Curtis O'Malley, Assistant Professor of Mechanical Engineering

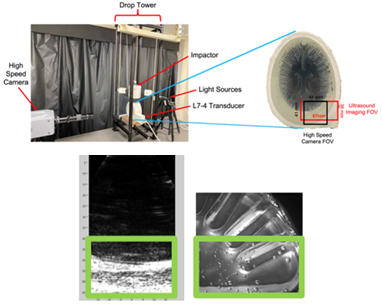 match the mechanical properties (stiffness) of human cranial tissues to study the
role of cavitation and shear deformation in simulated traumatic brain injuries (TBI).
Hydrogel formulations will be optimized to include tissue mimics for both anisotropic
white matter properties and isotropic grey matter properties, for both optical and
acoustic imaging during an impact of a cranial phantom in a drop tower apparatus.
Optimization for simultaneous imaging requires these materials to be transparent,
contain tissue-like sound scatter, and tissue-matched attenuation. The REU student
will acquire images of high-rate loading experiments using high-speed digital cameras
and high-frame rate ultrasound. To understand which impact circumstances may result
in cavitation induced injuries in mild to severe traumatic brain injuries, several
parameters will be varied: impact energy, head orientation, location of ultrasound
transducer, soft tissue models, and 3D printed skull geometries. The student will
use MATLAB and ImageJ softwares to extract cavitation event number, location, persistence,
and frequency over a given time period. The student will gain experience in acquiring
and quantifying image datasets using image processing. Research outcomes will include
new understanding of impact-induced traumatic brain injury conditions and insights
toward mitigation methods.
match the mechanical properties (stiffness) of human cranial tissues to study the
role of cavitation and shear deformation in simulated traumatic brain injuries (TBI).
Hydrogel formulations will be optimized to include tissue mimics for both anisotropic
white matter properties and isotropic grey matter properties, for both optical and
acoustic imaging during an impact of a cranial phantom in a drop tower apparatus.
Optimization for simultaneous imaging requires these materials to be transparent,
contain tissue-like sound scatter, and tissue-matched attenuation. The REU student
will acquire images of high-rate loading experiments using high-speed digital cameras
and high-frame rate ultrasound. To understand which impact circumstances may result
in cavitation induced injuries in mild to severe traumatic brain injuries, several
parameters will be varied: impact energy, head orientation, location of ultrasound
transducer, soft tissue models, and 3D printed skull geometries. The student will
use MATLAB and ImageJ softwares to extract cavitation event number, location, persistence,
and frequency over a given time period. The student will gain experience in acquiring
and quantifying image datasets using image processing. Research outcomes will include
new understanding of impact-induced traumatic brain injury conditions and insights
toward mitigation methods.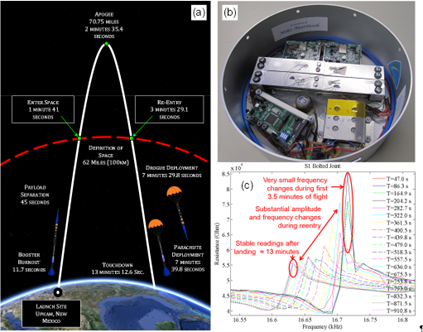 The dramatic increase in the number, nature, and operators of space missions in recent
years reinforces the need for techniques and methods to assess and qualify the structural
integrity of a vehicle or payload through all stages of spaceflight from launch to
orbit to re-entry. NMT
The dramatic increase in the number, nature, and operators of space missions in recent
years reinforces the need for techniques and methods to assess and qualify the structural
integrity of a vehicle or payload through all stages of spaceflight from launch to
orbit to re-entry. NMT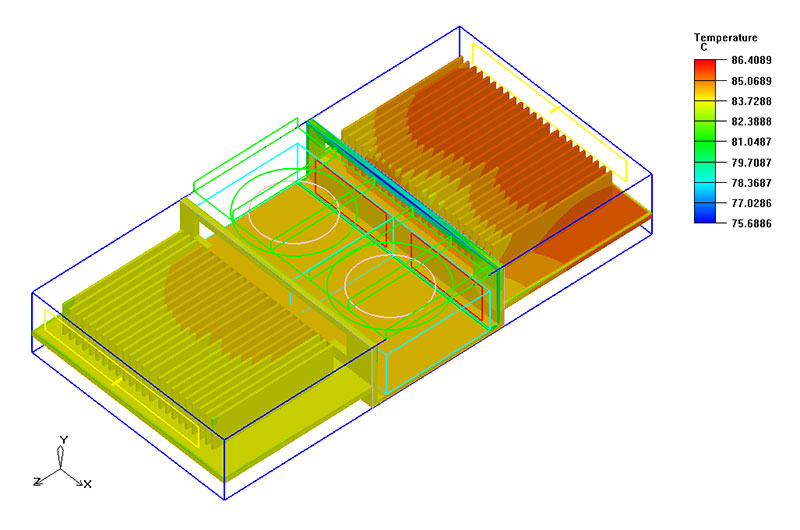 This REU project integrates computational fluid dynamics (CFD) and artificial intelligence
(AI) to optimize heat transfer and fluid flow in applications such as thermal management,
aerodynamic design, and renewable energy systems. Students will use CFD tools (e.g.,
ANSYS Fluent, OpenFOAM) to simulate complex scenarios and apply machine learning techniques
(e.g., neural networks, genetic algorithms) to predict and optimize system performance.
This REU project integrates computational fluid dynamics (CFD) and artificial intelligence
(AI) to optimize heat transfer and fluid flow in applications such as thermal management,
aerodynamic design, and renewable energy systems. Students will use CFD tools (e.g.,
ANSYS Fluent, OpenFOAM) to simulate complex scenarios and apply machine learning techniques
(e.g., neural networks, genetic algorithms) to predict and optimize system performance.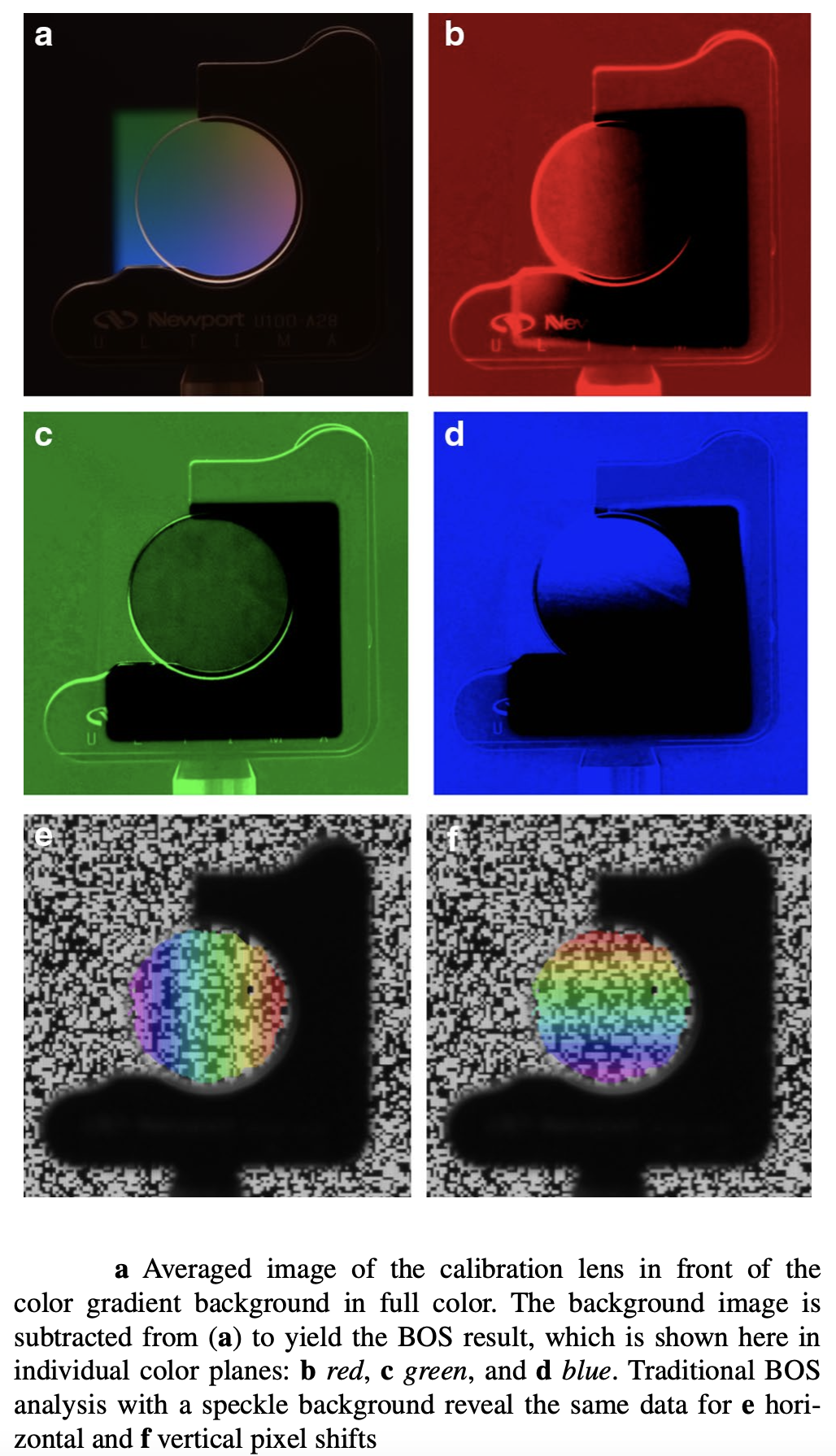 This research project focuses on advancing the technique of Background Oriented Schlieren
(BOS) imaging by developing and analyzing the effectiveness of structured background
patterns. Traditional BOS imaging often employs randomized speckle patterns, but this
project explores whether specific color and image patterns can streamline image processing
while maintaining or enhancing quantitative accuracy. The REU student will design,
fabricate, and test structured backgrounds using various experimental setups to investigate
their impact on flow visualization and refractive index gradients. Key tasks include
evaluating the clarity, resolution, and quantitative precision of BOS measurements
with varying structured patterns under controlled experimental conditions. This work
will expose students to optical imaging techniques, image processing software (e.g.,
MATLAB or Python), and experimental fluid dynamics principles. Research outcomes may
contribute to improved BOS methodologies, enabling simpler and more efficient image
analysis for applications in explosives engineering, fluid mechanics, and thermal
sciences.
This research project focuses on advancing the technique of Background Oriented Schlieren
(BOS) imaging by developing and analyzing the effectiveness of structured background
patterns. Traditional BOS imaging often employs randomized speckle patterns, but this
project explores whether specific color and image patterns can streamline image processing
while maintaining or enhancing quantitative accuracy. The REU student will design,
fabricate, and test structured backgrounds using various experimental setups to investigate
their impact on flow visualization and refractive index gradients. Key tasks include
evaluating the clarity, resolution, and quantitative precision of BOS measurements
with varying structured patterns under controlled experimental conditions. This work
will expose students to optical imaging techniques, image processing software (e.g.,
MATLAB or Python), and experimental fluid dynamics principles. Research outcomes may
contribute to improved BOS methodologies, enabling simpler and more efficient image
analysis for applications in explosives engineering, fluid mechanics, and thermal
sciences.